关键字: 英威腾DA200伺服 龙门同步 定位精确 高速响应
1. 设备简介
全自动锡膏印刷机一般由装版、加锡膏、压印、输电路板等机构组成。它的工作原理是:先将要印刷的电路板固定在印刷定位台上,然后由印刷机的左右刮刀把锡膏或红胶通过钢网漏印于对应焊盘,对漏印均匀的PCB,通过传输台输入至贴片机进行自动贴片,本设备双Y轴为丝杆连接的龙门结构,在高速定位的过程中要保持两边速度一致,这就需要伺服带有龙门同步的功能;

图 1
2. 龙门同步简介
龙门同步的使用,重点在控制两个移动平台等速移动,若两轴间的移动有太大的差异量,则会造成机构的损坏,因此两轴之间的同步移动控制为龙门同步使用的第一要务。
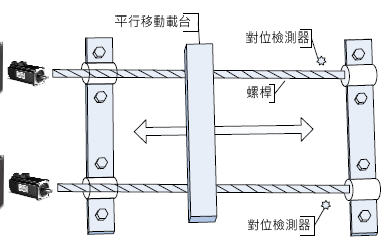
图 2
INVT英威腾的DA200系列所提供的龙门同步控制功能,让使用者顺利的达成需求,驱动器将自行同步控制,当位置偏差超过设定的允许值时,则会发出警告,停止系统运行。P4.33[位置超差脉冲范围]可以设置报警的位置超差阈值。龙门同步控制一个重点主要在于首先要保证左右龙门架的平行性,第一步就需要通过回原点功能把龙门架摆直,回原点的过程上位机只给出一个回原点信号给左右两台伺服,在碰到左右两个原点开关后,后面的动作均有伺服来完成回原点动作;首先上位机给分别同时给出主机和从机回原点信号,主机(从机)先碰到原点感应器后停止,等待从机碰到原点感应器,两个信号同时有效后同时往后运行1圈(P6.38=10000)让后再往前同时运行直到碰到感应开关停下来,期间在回原点过程中主机一直给从机龙门解除信号,对位完成后给出龙门同步信号;龙门架对位完成后由上位机最终给出机械回原点信号;DA200内置6种应用在不同工控下的回原点模式供客户选择。
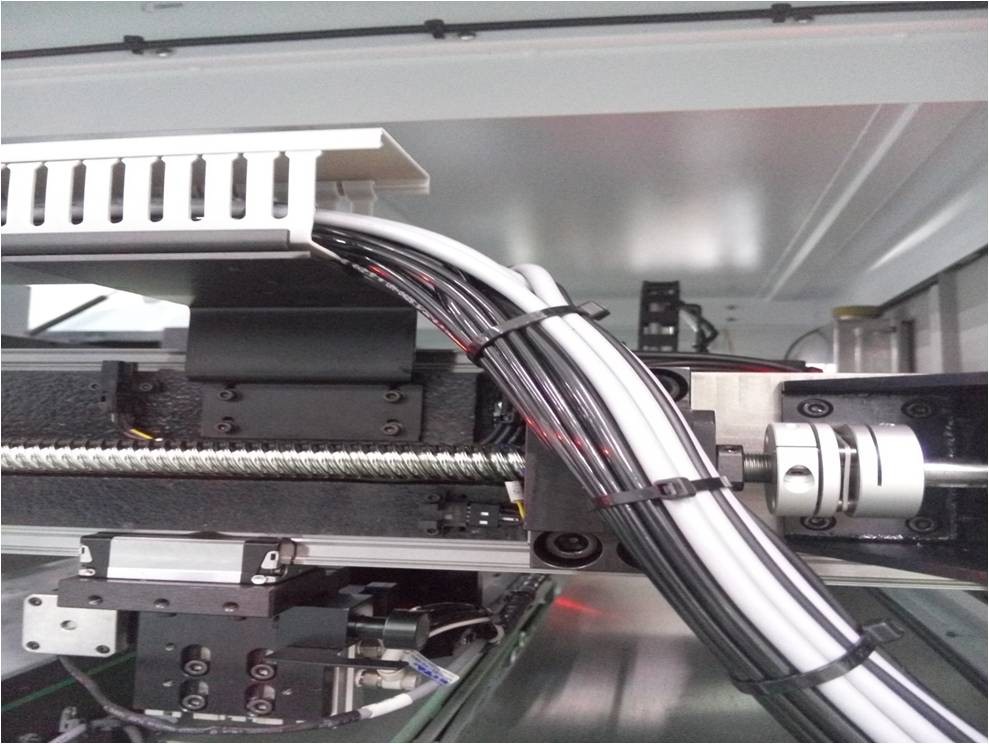
图 3
3. 龙门控制原理
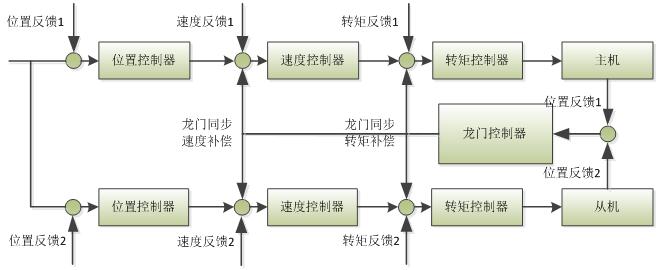
如下图所示,龙门同步控制器会实时读取主机与从机的位置信号,从而得出主机与从机的位置与速度差值,然后输出速度与转矩补偿指令,以达到主机与从机同步运行的效果。
根据实际系统设置主机的P6.31到P6.35.

图表 4
4. 电气接线
主机:脉冲信号.从机分频输出.伺服报警.原点启动(DI1).原点感应器(DI2).回原点完成(D01).龙门同步解除(DO2)
从机:脉冲信号.主机分频输出.伺服报警.原点感应器(DI2)龙门同步解除(DI3)
| 主机接线 | |||||
| 角位 | 定义 | ||||
| 23 | PULSE+ | ||||
| 24 | PULSE- | ||||
| 32 | SIGN+ | ||||
| 33 | SIGN- | ||||
| 2 | V24+ | ||||
| 12 | V24- | ||||
| 15 | 故障报警 | ||||
| 44 | 0A+ | 3 | EXA+ | 从机CN5端 | |
| 43 | OA- | 4 | EXA- | ||
| 41 | OB+ | 10 | EXB+ | ||
| 42 | OB- | 9 | EXB- | ||
| 16 | 主机回零启动 | ||||
| 37 | 主机原点开关 | ||||
| 9 | 龙门解除 | 输出给从机 | |||
| 14 | 回原点完成 | ||||
| 10 | 从机原点开关 | ||||
| 从机接线 | |||||
| 角位 | 定义 | ||||
| 23 | PULSE+ | ||||
| 24 | PULSE- | ||||
| 32 | SIGN+ | ||||
| 33 | SIGN- | ||||
| 2 | V24+ | ||||
| 12 | V24- | ||||
| 15 | 故障报警 | 主机CN5端 | |||
| 44 | 0A+ | 3 | EXA+ | ||
| 43 | OA- | 4 | EXA- | ||
| 41 | OB+ | 10 | EXB+ | ||
| 42 | OB- | 9 | EXB- | ||
| 16 | 从机回零启动 | ||||
| 10 | 龙门解除 | 接收主机输入 | |||
5. 伺服调试步骤
* P6.30打开龙门同步开关;
* 根据IO口的接线确定主机和从机(P6.37)
* P4.62光栅尺方向与电机方向一致;
* 在线学习机械惯量(可通过R0.51观察机械实时负载惯量比)
* 根据实际情况调试增益;
* 根据情况设置P4.64参数(可通过R0.53查看龙门同步位置偏差值)
* 根据实际情况看是否需要取反龙门同步对位方向(P6.41)和龙门同步对位后退距离(P6.37)
具体参数设置如下:
| 主机 | 从机 | ||
| P0.22=10000 | 每转脉冲 | P0.22=10000 | 每转脉冲 |
| P0.24=1 | 反向取反 | P0.24=1 | 反向取反 |
| P1.01=600 | 惯量比 | P1.01=600 | 惯量比 |
| P3.00=0X108 | 回零启动 | P3.00=0X108 | 回零启动 |
| P3.01=0X02E | 主机原点开关 | ||
| P3.02=0X02F | 从机原点开关 | P3.02=0X02D | 龙门解除 |
| P3.05=103 | 使能 | P3.05=103 | 使能 |
| P3.10=0X00F | 回原点完成 | ||
| P3.11=103 | 报警极性取反 | P3.11=103 | 报警极性取反 |
| P3.14=0X01E | 龙门解除 | ||
| P4.64=1000 | 混合偏差过大设定 | P4.64=1000 | 混合偏差过大设定 |
| P6.30=1 | 龙门同步功能开关 | P6.30=1 | 龙门同步功能开关 |
| P6.33=48 | 同步位置控制增益 | P6.33=48 | 同步位置控制增益 |
| P6.37=1 | 龙门同步主从机选择 | P6.37=0 | 龙门同步主从机选择 |
| P6.38=1500 | 龙门同步对位后退距离 | P6.38=1500 | 龙门同步对位后退距离 |
| P6.41=1 | 龙门同步对位方向 | P6.41=1 | 龙门同步对位方向 |
| 请改完参数后断电生效 | |||
6. 龙门同步方案总结
* 英威腾伺服系统DA200内置龙门同步功能,简化上位控制器,降低控制成本;
* 同步精度高,重复定位精度1mm;
* 运行安全可靠,当主从伺服任意一台出现报警状态,龙门架马上停止;
* 同步调试便捷。
