在国家政策支持和市场需求的双轮驱动下,新能源汽车和动力电池发展呈喷井式增加。未来3-5年将是锂电设备高速增长期。然而电池技术往往是一个瓶颈,往上提升在技术层面非常困难,需要投入成倍的人力和物力换来比之前小得多的进步。锂电池的产能和性能,远不能满足终端电动车及储能市场的新增需求。锂电设备行业繁荣的背后,面临着效率低、稳定性差、自动化程度不高等“痛点”。
英威腾深挖行业需求,围绕锂电池设备市场开发出一系列的伺服控制系统解决方案,将自动化驱动与控制技术与锂电池生产技术相结合,大幅度提高锂电池生产线的自动化和智能化程度,提高生产效率和产品质量,带动锂电池生产企业的技术升级和改造。
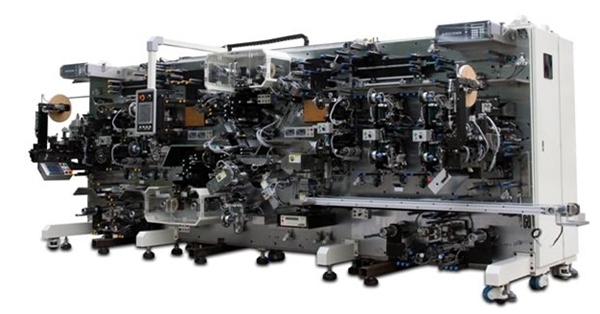
本项目客户为领先的作为领先的锂电池智能装备制造商。制片属于锂电池加工过程中的一个重要环节。英威腾伺服应用于该客户的电池制片机,以领先的性能和高性价比,降低投入成本,提升制造工艺和效益,满足大批量、精益化的生产需求。
1.1 设备原理
电池制片机是用于生产正极极片或负极极片的设备, 用于生产锂电池正极极片(铝质)或负极极片(铜质)。一种极性需要一台设备,一般是正负极两台设备在不同车间同时加工。将极片、极耳料卷分别安装在放卷轴上,实现自动放卷、自动纠偏、自动焊接极耳、自动贴胶、极耳包胶,切断或收卷的功能。

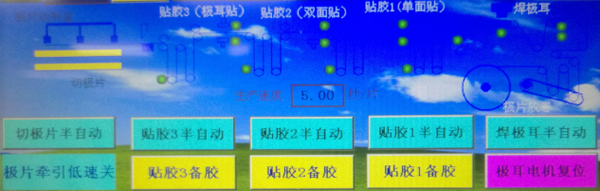
1.2 工艺流程
主要工艺过程为:自动放卷---焊前纠偏---送极耳---焊极耳---贴胶1---贴胶2---贴胶3(极耳贴)---纠偏---切片或收卷。
1.3 技术要求及难点
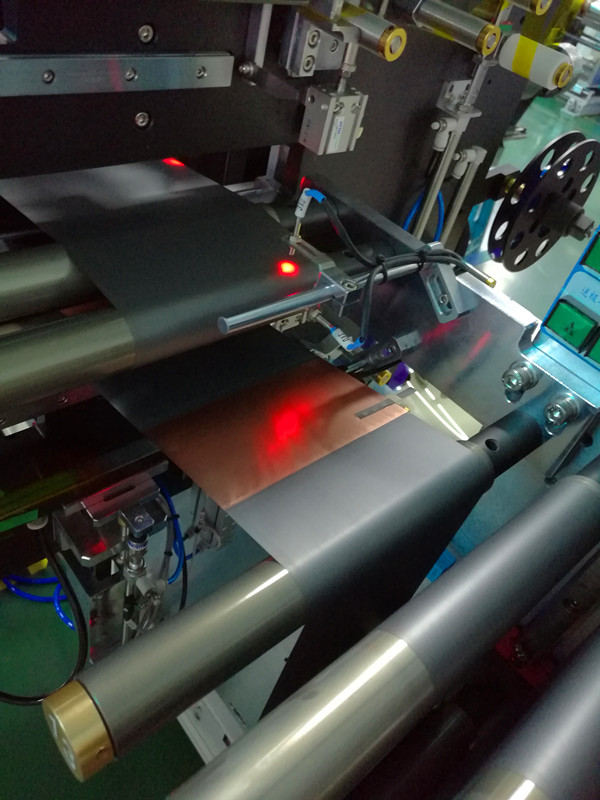
1. 自动放卷:系统通过电位器输出模拟量转换为速度控制,前方牵引速度增快则储料区摆杆角度变大,电位器输出模拟量速度变大同步调节,慢则随之慢,保持同步,从而实现自动放卷控制。
2. 牵引胶贴:位置控制,光电扫描极片表面上升沿信号,给到PLC,中断触发,一定数量的脉冲给到伺服定长运行。
3. 自动纠偏:纠偏传感器输出模拟量速度控制,通过测量极片进入感应区域的位置采样变化来输出信号,系统再用这个变化的信号来控制伺服带动整个机构不断左右调整来料位置,从而实现自动纠偏。
4. 自动收卷:电位器输出模拟量速度控制,来料牵引速度增快则储料区摆杆角度变大,电位器输出模拟量速度变大,慢则随之慢,从而实现自动收卷控制。必须注意收卷表面张力要调整合适,否则容易造成直径大了收不紧,或两边松紧不一爆边现象。
使用的伺服系统是高性能驱动器、动态响应时间短、位置控制快速精确,调试简便,适应灵活作业,中断定位响应时间短,无需降速运行,不再需要减速传感器。伺服电机需要大惯量、大扭矩、兼容步进驱动器的安装尺寸、在低速时有足够大的启动转矩输出且运转平稳,以便在与机械运动部分连接中尽量减少中间环节,耐用性更强,稳定性更高。
英威腾采用了PLC内置定位+伺服中断定位的控制技术, 充分结合了DA200系列高性能伺服动态响应快、定位精确、整定时间短、自适应、运行平稳的优点,中断定位响应时间为0.05ms,无需降速运行,不再需要减速传感器,降低用户机械投入成本,提升制造工艺和效益。
|
伺服控制器 |
伺服电机 |
|
SV-DA200-0R7-2-E0 |
SV-ML08-0R7G-2-1A0-1000 |
|
SV-DA200-0R7-2-E0 |
SV-MH08-0R7G-2-1A0-1000 |
|
SV-DA200-0R4-2-E0 |
SV-ML06-0R4G-2-1A0-1000 |
|
SV-DA200-0R1-2-E0 |
SV-ML04-0R1G-2-1A0-3000 |

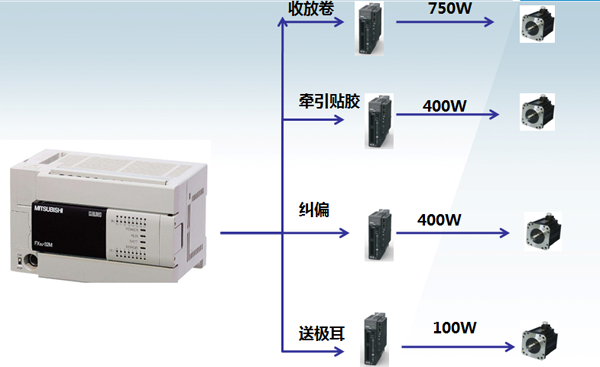
1. 全系伺服均采用英威腾DA200系列高性能交流伺服系统,性能强大稳定,调试方便,性价比高,特别适合锂电池行业国产伺服替代进口多伺服的应用。
2. 便捷的定位指令,轻松实现绝对定位控制和相对定位控制。支持带DOG搜索的原点回归,当设备出现故障停机,重开机时无论机械部分停在任何位置,都可自动回到原点,无需手动调节。
3. 收放卷模型计算精度高、张力浮辊PID控制灵活、控制方式多样化、动作简单化、无需高速计数模块、高速中断定位控制、客户编程简单。
4. 收卷使用英威腾定制大惯量电机,大容量电池直径大的规格也能收料整齐。
5. 总线构成闭环控制系统,具有易扩展、配线简化等特点,并可以支持以太网通信协议,为工业4.0智能化工厂的建设奠定了坚实的技术基础。
未来已来,锂电池设备的高精度、高效率以及高自动化生产线将成为行业发展的大方向。英威腾在锂电设备市场可提供包括卷绕、制片、叠片、模切、涂布、化成等全流程工序套电气解决方案,协助企业实现生产效率、综合能效、企业效益的全面提升。
